La corrección de linealidad se basa en la función del controlador paso a paso Trinamic que permite definir una forma de onda de corriente personalizada.
La forma de onda trinámica predeterminada es una función sinusoidal, pero la forma de onda real puede ser un poco diferente y depende del tipo de motor paso a paso. Además, los motores del mismo tipo pueden tener diferentes formas de onda. La mayor distorsión aparece cuando la onda cruza el punto cero (o alrededor de él), por lo que la onda sinusoidal original se modifica usando la función de potencia para eliminar esta distorsión.
Procedimiento de calibración de corrección de linealidad
- Ve a tu impresora, al menú LCD -> Ajustes -> Lin.Correction->E correct,y luego apágalo
- Descarga e imprime el codigo G de calibración
- Observaras que aparecerán algunas líneas diagonales de muaré en la torre. Encuentra un lugar con la mejor superficie en el objeto de calibración.
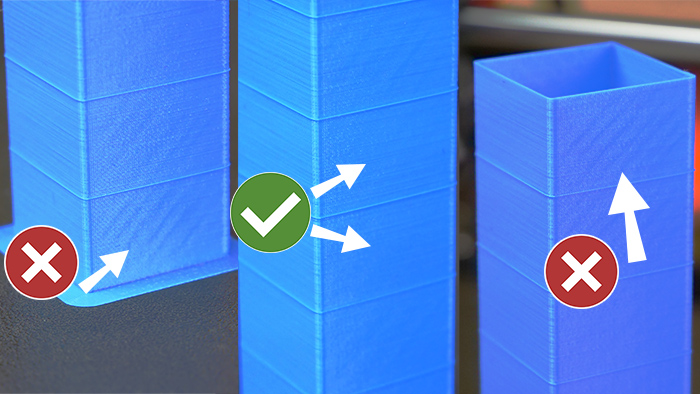
- La mayoría de las impresoras tendrán una distorsión mínima alrededor del centro vertical del objeto (valor 1,10), pero la tuya puede ser diferente. Anota tu valor ideal.
- Habilita la corrección E de nuevo en el menú LCD -> Ajustes -> -Lin.Correction->E correct. Ajusta el valor con el que estabas contento.
En el firmware 3.13.0 y más nuevo, se ha modificado el sistema de numeración de menús para el factor de corrección, que va de 0 a 200.
Así es como corresponde:
El factor de corrección 1.03 se representa como 030 en el menú.
El factor de corrección 1.11 se representa como 110 en el menú. - Imprime algo y ve si las líneas diagonales todavía están allí. Si es así, vuelve al paso 3.
p>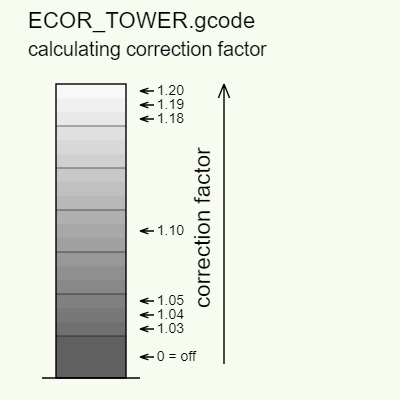
1 comentario
Si tienes algún problema con alguno de estos ejes, contacta a mis colegas en el equipo de Soporte Técnico con los detalles de tu impresora y el problema.
https://help.prusa3d.com/es/article/atencion-al-cliente_2287
Un saludo,