Einsy Ramboコントロールボード上のTrinamicドライバは、モーターのステップ飛ばしを検出し、ノズルの衝突等によるレイヤーずれを防止することができます。Normalモードでのみ動作します(Stealthモードでは動作しません)。レイヤーシフトは通常、エクストルーダーがオブジェクト間を素早く移動し、反ったプリントオブジェクトの一部にぶつかったときに起こるため、クラッシュ検出の閾値はより高速に設定されています。
解決する方法
クラッシュ検出がうまくいかない場合、プリンタ内のハードウェアの問題である可能性が高いのですが、これは非常に簡単に解決できます。以下の手順に従ってください。:
パワーモード
プリンタが、クラッシュ検出ができないステルスモードではなく、ノーマルモードで動作していることを確認してください。現在のモードは、LCD Menu - Settings - Mode [Stealth/Normal]で確認することができます。電源モードの詳細については、パワーモードを参照してください。
ロッドとベアリング
乾いたペーパータオルでスムースロッドをきれいにします。その後、スムースロッドに潤滑剤を少量塗布してください。
ヒートベッドやエクストルーダーを手で押したときに動きが悪いと感じたら、Y軸やX軸を取り外し、ベアリングをスムースロッドから取り外し、内側に注油してください。スムースロッドを戻す際にベアリングを傷つけないように注意してください。
ベルトの張り具合を確認する
プリンタのベルトとプーリーが正しく締め付けられており、ベルトがプーリーを飛び越えてしまわないかを確認してください。MK3またはMK3Sをお使いの場合、LCD menu -> Support -> Belt StatusでBelt Statusの数値を確認します。数値は240以下、300以上であることが望ましいですが、理想的な数値は一つではありません。数値は量を表すものではありません。
- 値が240以下(または近い)の場合、ベルトを緩める必要があります
- 300を超える(または近い)場合、ベルトを締める必要があります
- 値はSelftestを実行するたびに更新されます。
MK2.5、MK2/S、およびそれ以前のモデルには、ベルトの状態のオプションはありません。手がかりとなるのは、ベルトを弾いたときに低音弦のようなおおまかな音がすることです。親指と人差し指で両側をつまむことができるはずですが、少し抵抗があるように感じるはずです。
X/Y軸のモーターとプーリーの確認
プーリーがモーター軸の周りを空転していないことを確認します。XモーターとYモーターはモーターマウントに締め付けられ、プーリーはモーターシャフトに固定され、反対側のプーリーと位置が合い、プーリーが自由に動くようになっていなければなりません。両方のグラブスクリューが締まっている必要があり、そのうちの1つはモーターシャフトの平らな部分に対して締まっている必要があります。プーリーの緩みは、通常、レイヤーシフトが発生する原因となります。
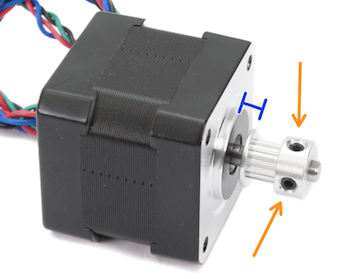
また、両軸のプーリーが揃っていること、つまりモーターのプーリーがしっかりと中央に位置していることが必要です。プーリーが回転している間にベルトが右から左へ移動してはいけません。
コネクター
モーターを点検した後、einsyRAMBOのケースを開けて、モーターのコネクターが正しく差し込まれていることを確認し、再び装着してください。
プリント形状および設定
オーバーハングしたオブジェクトは、一般的にプリントしにくくなります。オーバーハングの中には、プリント中に上に反ってしまうものもあり、ノズルがそこに衝突してしまうこともあります。3Dモデルをスライスする際に、インフィルの割合を小さくしすぎると、同じようなことが起こる場合があります。
プリントのオーバーハングを防ぐには、オブジェクトをカットするとよいでしょう(切取りツールの記事で確認してください)。また、PrusaSlicerでプリントファンの回転数を上げたり、Z-hopの距離を長くしてみるのも良いでしょう。フィラメント設定→冷却のプリントファン速度、プリンター設定→エクストルーダー1のZ-hop距離です。
どれも問題解決にならなかった場合
心配はいりません。少なくとも、プリンターの最も重要な部分のいくつかをチェックしたのですから、もう大丈夫です。最初に使ったときにSDカードに入っていたGコードを1枚プリントしてみてください。削除してしまった場合は、こちらから再ダウンロードください。Printables.com
また、衝突検知をオフに切り替えてみてください(LCD Menu - Settings - Crash. det. [on/off] 、または、プリント中にLCDメニュー - Tune - Crash Detection)。また、印刷速度を遅くする(PrusaSlicerで、または印刷中にノブを反時計回りに回す)のも効果的です。