- Čeština
- Español
- Italiano
- Deutsch
- Polski
- Français
- 日本語
- Home
- Calibration
- Advanced calibration
- Extruder linearity correction calibration
Extruder linearity correction calibration
- Basic calibration
- Advanced calibration
- Bed Level Correction
- Extruder linearity correction calibration
- Linearity correction calibration procedure
- Extrusion multiplier calibration
- Linear Advance
- Manual temperature calibration
- Phase Stepping (XL)
- PID tuning
- Squaring your MINI
- Calibration Error Messages
Linearity correction is based on the Trinamic stepper driver feature that allows defining a custom current-waveform. The default Trinamic waveform is a sine function, but the real waveform can be a little bit different and depends on the stepper motor type. Also, motors of the same type can have different waveforms. The biggest distortion appears when the wave is crossing the zero point (or around it), so the original sine wave is modified using power function to eliminate this distortion.
Linearity correction calibration procedure
- Go to your printer's LCD menu -> Settings -> Lin.Correction->E correct, and then turn it off
- Download and print the Calibration g-code
- You will observe that some diagonal moire lines will appear on the tower. Find a place with the best surface on the calibration object.
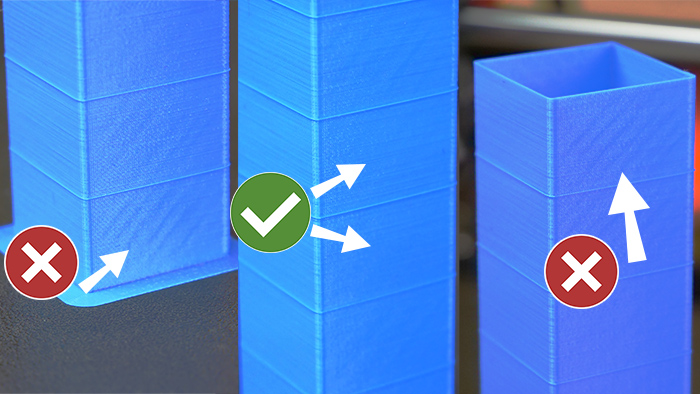
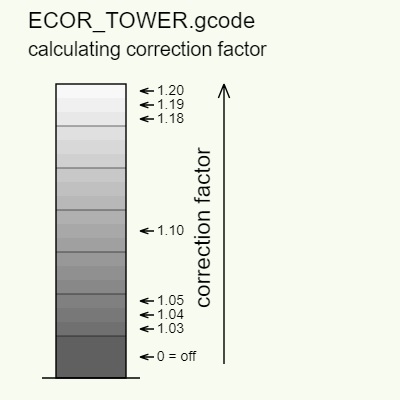
- Most printers will have minimal distortion around the vertical center of the object (value 1.10), but yours might be different. Note your ideal value.
- Enable the E-correction again in LCD menu -> Settings -> Lin.Correction->E correct. Adjust the value to the one that you were happy with.
In firmware 3.13.0 and newer, there has been a change in the menu numbering system for the correction factor, ranging from 0 to 200.
Here's how it corresponds:
Correction factor 1.03 is represented as 030 in the menu.
Correction factor 1.11 is represented as 110 in the menu. - Print something and see if the diagonal lines are still there. If so, please go back to step 3.
Comments


Still have questions?
If you have a question about something that isn't covered here, check out our additional resources.
And if that doesn't do the trick, you can send an inquiry to [email protected] or through the button below.